Insecte aussi simple .. que non fonctionnel.
Intro
L'objectif est de faire un robot à 6 pattes et le faire avancer (un peu)
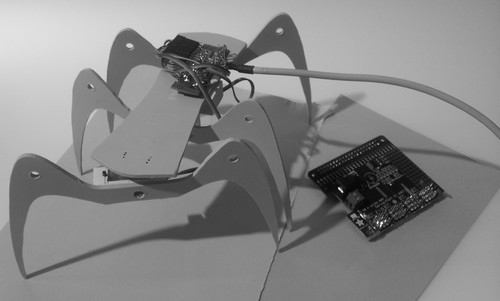
En images, c'est mieux
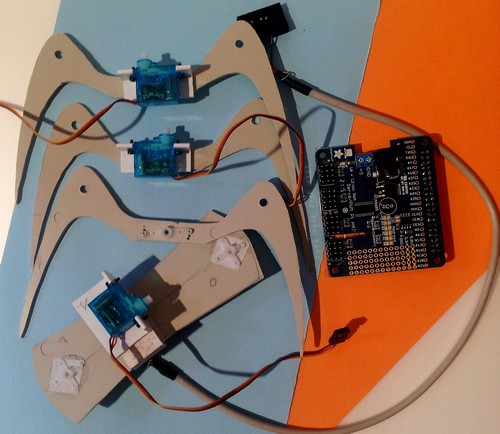
La mécanique est relativement simple :
- Trois paires de pattes identiques, en forme de M majuscule,
- Trois servo-robots (des petits),
- Un corps de forme à peu près rectangulaire,
- Une carte d'extension spécialisée dans la gestion des servos,
- Des câbles de connexion et j'ai bricolé une rallonge qu'on voit sur la photo :(
Le principe pour avancer est simple :
- La patte centrale souleve le robot d'un côté (/ex. à droite),
- Les pattes avant et arrière tournent un coté vers l'avant (du coté haut = à droite),
- La patte centrale bascule le corps de l'autre côté (à gauche) et
- les pattes AV et AR avancent de ce même côté (à gauche).
- et on recommence.
Résultat : le robot avance .. pas beaucoup mais bouge assez bien. C'est rigolo. Hm! Essai raté.
En fait, ça pourrait marcher (c'est le cas de le dire) si la paire centrale pouvait glisser au sol. Mais bon, passons à la suite et réinventons la roue.
Voir le détail des pièces ci-dessous.